Remtec Proudly Celebrates 40 Years
This year, Remtec Automation, LLC is proud to celebrate 40 years of successfully serving our customers with innovative robotic systems and integrated automation for robotic material handling applications.
Over the past four decades, Remtec has acquired a reputation as a leader among robotic system integrators. We have remained at the forefront of robotic innovations since the early 80’s, when technologies like motor driven robots and machine vision were first being developed and used in industrial applications.
A Brief Robotic History
According to the International Federation of Robotics, the first industrial robot was developed by George Devol and Joseph Engelberger in 1959. The robot weighed in at two tons and operated on a magnetic drum. It was programmed in joint coordinates and replayed in operation that was accurate to within 1/10,000 of an inch. From that point, a few notable timeline highlights in robotic history include:
1961 – The first installation of an industrial robot in auto manufacturing – Unimation installed a production line robot at the GM Ternstedt plant in Trenton, NJ, which made door and window handles, gear shift knobs, light fixtures and other hardware for automotive interiors.
1969 – The first installation of spot-welding robots – Unimation robots increased spot welding productivity at GM’s Lordstown, OH plant. These robots allowed more than 90 percent of body welding operations to be automated vs. only 20 – 40 percent previously.
1972 – FUJITSU FANUC LTD was founded and became independent from FUJITSU LIMITED.
1974 – The first minicomputer-controlled industrial robot – Cincinnati Milacron Corporation develops the T3, the first commercially available minicomputer-controlled industrial robot.
1974 – The first fully electric, microprocessor-controlled industrial robot – This robot had an anthropomorphic design, similar to the movement of a human arm, but with a payload of 6kg and 5 axis.
1976 – General Numeric Corporation established in the U.S.A. – A joint venture by FANUC and Siemens A.G.
1976 – The use of robot arms in space – Viking 1 and 2 space probes employ the use of robotic arms.
1977 – The robotic assembly cell is developed – Hitachi of Japan develops a vacuum cleaner assembly cell with 8 TV cameras and two robot arms.
1977 – Fanuc USA Corporation was established – The commercial production and shipment of robots started (ROBOT-MODEL 1).
1978 – The development of SCARA robots – Hiroshi Makino, University of Yamanashi, Japan, develops the Selective Compliance Assembly Robot Arm.
1981 – The installation of a machine vision system – General Motors in St. Catherines, Ontario uses machine vision to sort up to six different castings at up to 1,400 an hour from a belt conveyor using three industrial robots.
1981 – Remtec Inc. (later to become Remtec Automation, LLC) is founded in Cincinnati, Ohio – Remtec began as a spin-off company from Cincinnati Remachine with a focus on robotic and other factory automation technologies.
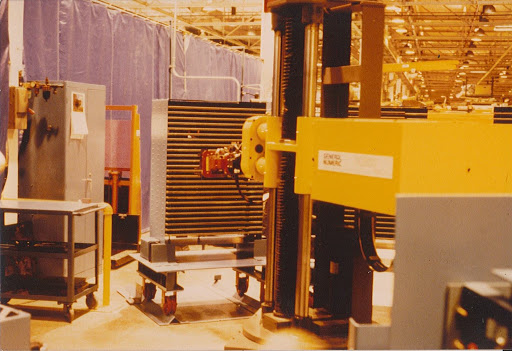
1981/1982 – Remtec first robotic workcell installation – The cell featured a General Numeric ROBOT-MODEL 3 (Fanuc) loading plate steel into a Mazak V-7.5 machining center for Westinghouse Elevator.

1982 – GMFanuc Robotics Corporation was established in the U.S.A. – A joint venture by FANUC and General Motors.
Remtec has been committed to remaining at the forefront of robotic technology and innovation. We’re proud to be an established Authorized System Integrator for Fanuc Robotics not only as an ASI but also as a Certified Vision Specialist and a Certified Service Provider. Our strength is our demonstrated ability to design, build, install, and support complete turn-key systems for your unique process needs including: robotic machine tending, automated assembly, dispensing, material removal, case & tray packing, palletizing, depalletizing, high speed picking, vision inspection, and material handling.
Our industry and applications experience translates to your competitive advantage. Contact us to discuss how Remtec can help you advance your business through automation.